Primal-Dual based Safe Reinforcement Learning for Multi-Agent Navigation with Graph Information Aggregation
Description
This work presents a novel primal-dual based safe multi-agent reinforcement learning framework for multi-agent navigation tasks with graph information aggregation. The proposed method effectively addresses the challenges of ensuring safety and coordination among multiple agents in complex environments. By leveraging primal-dual optimization techniques, our method enables agents to learn optimal navigation policies while adhering to safety constraints. The integration of graph information aggregation allows agents to share and utilize information about their surroundings, enhancing their decision-making capabilities. Experimental results demonstrate the effectiveness of our method in achieving safe and efficient navigation in multi-UAV scenarios with different scales.
Visualization
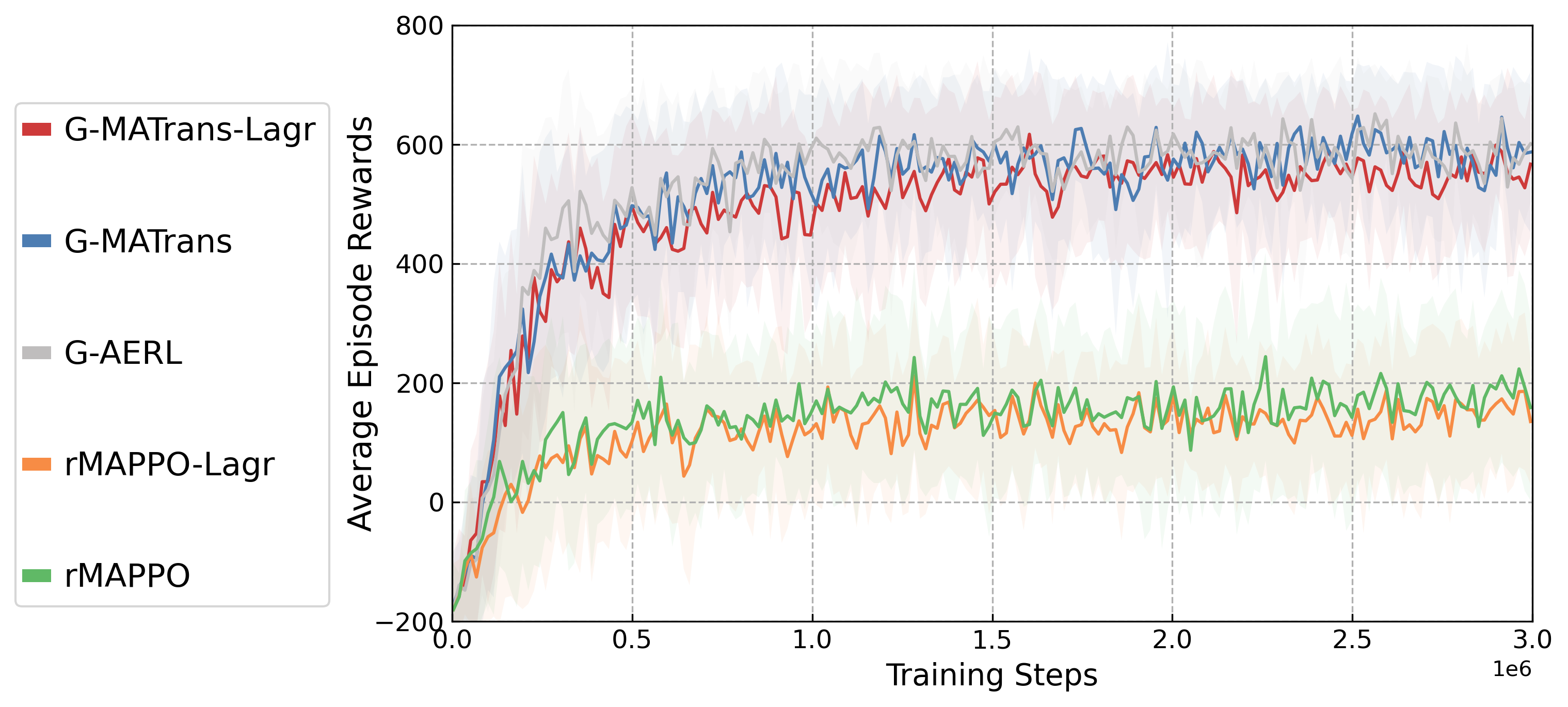
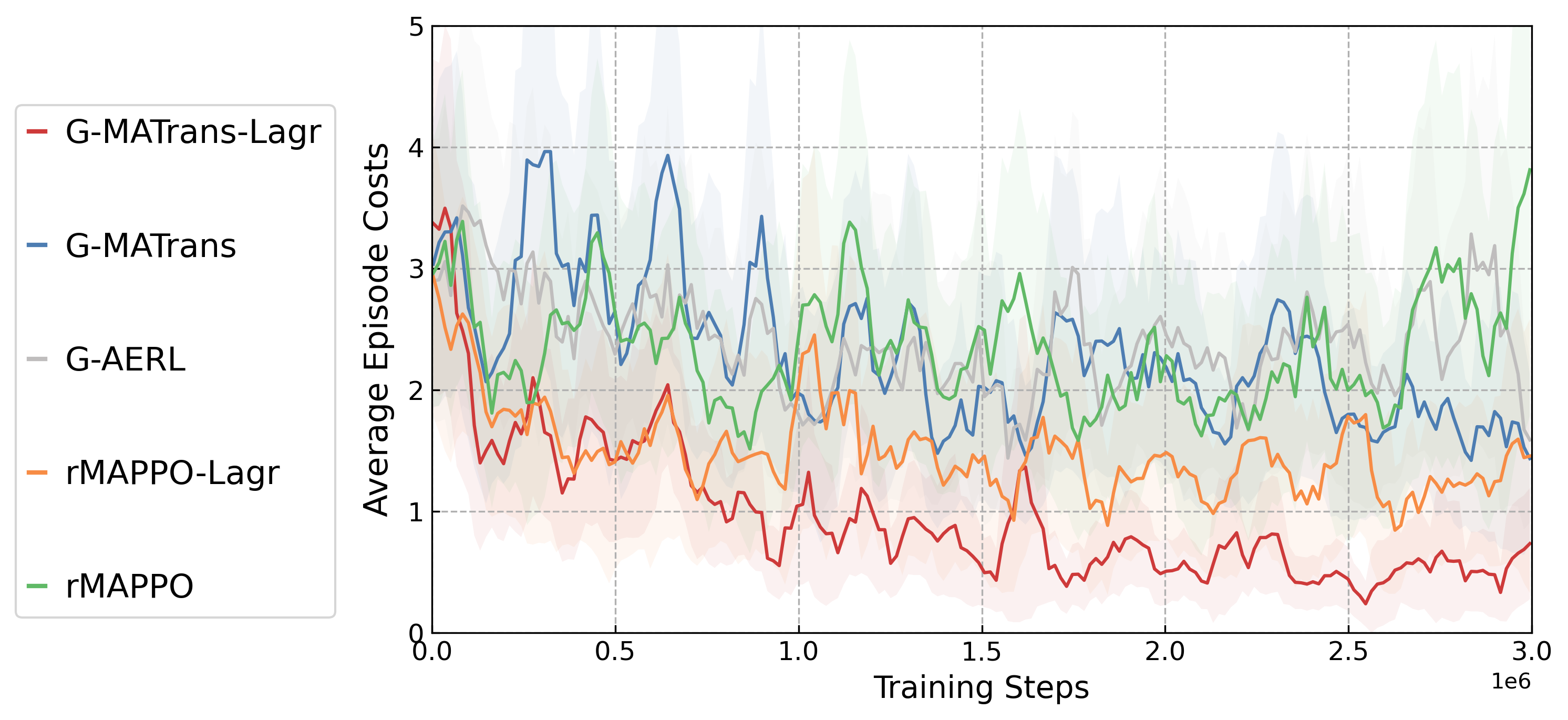
Here is the training reward and cost. Our hybrid framework integrates GNNs and MAPPO-Lagrangian methods to tackle safe multi-agent navigation problem with collision avoidance.
The following GIFs illustrate the navigation process of 9 UAVs trained using our proposed method in environments.