Cooperative detection of a mobile area using multiple directional sensors
Background
Most coverage problems focus on optimizing the deployment of sensors to monitor a large area effectively. In this research, we address the challenge of detecting a small and mobile area using directional sensors with limited sensor range. The main difficulty lies in calculating the intersection part of multiple sectors and the target area, meanwhile efficiently planning the paths of multiple agents to maximize the detection probability.
Methods
-
The relevant detection region is modeled as a convex set, the intersecting area is characterized via the inclusion–exclusion principle, and the associated objective function is formulated accordingly.
-
The sensing orientation for agents is treated as a decision variable, and the detection task is modeled as a constrained optimization problem whose objective is to maximize the probability integral over the intersection of the sensing sectors and the target area.
-
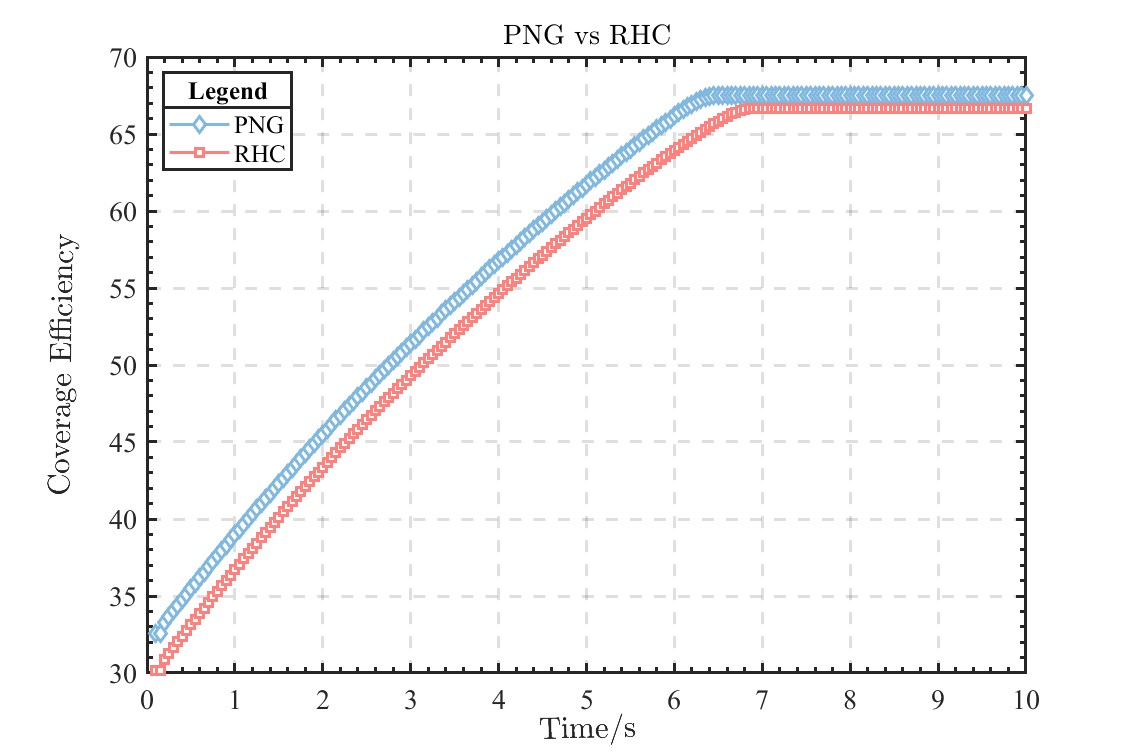
Model predictive control is employed to compute the sensor’s motion commands, minimizing energy expenditure while maintaining a prescribed coverage efficiency.
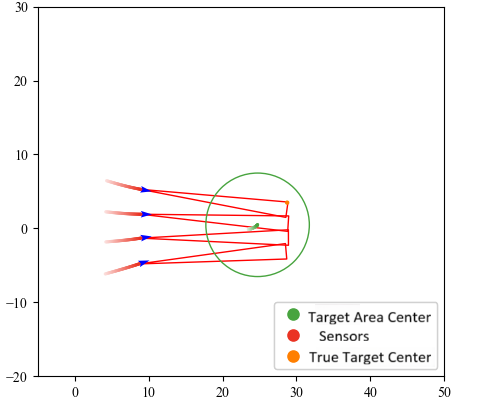
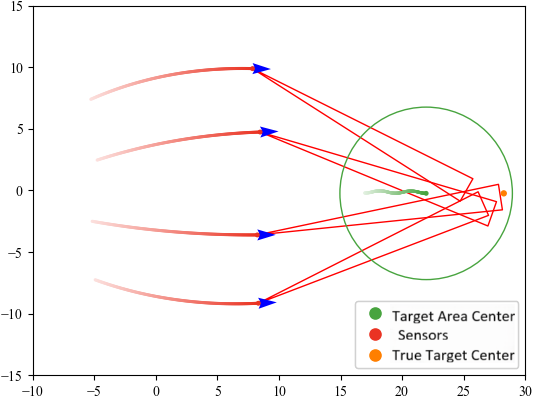
Visualization
The following figures describe the coverage detection scenario in 2D situations. The time step shows the instant sensors orientations and the detected area.